
近日,同济大学工程风险研究团队黄宏伟教授、张东明教授、常佳奇博士研究生在《Advanced Engineering Informatics》期刊上发表了题为《Improved model-free adaptive control of shield machine posture during tunnelling》的研究论文,介绍了采用改进的无模型自适应控制方法对施工过程中的盾构机姿态进行控制的相关研究。
智能预测从来都不是人工智能在隧道工程领域的最终目标,基于准确的预测模型实现决策的优化才是实现智能建造的必经之路。针对隧道工程施工过程中盾构机所处的地层会不断变化,盾构机系统自身也在不断变化的特点,本研究将自适应控制方法应用于盾构法施工过程中,基于数物双驱动的机器学习预测模型,对无模型自适应控制方法进行改进(图1),实现了施工过程中盾构机姿态的自适应控制。论文首先分析了传统自适应控制方法在盾构施工过程中的应用限制:传统的自适应控制方法要求建立系统的显式物理模型。又分析了未改进的无模型自适应控制对于系统慢时变的要求并不适用于快时变的盾构掘进系统。因此,最终选取了大数据模型和数值模拟模型对无模型自适应控制中的伪梯度估计进行改进。
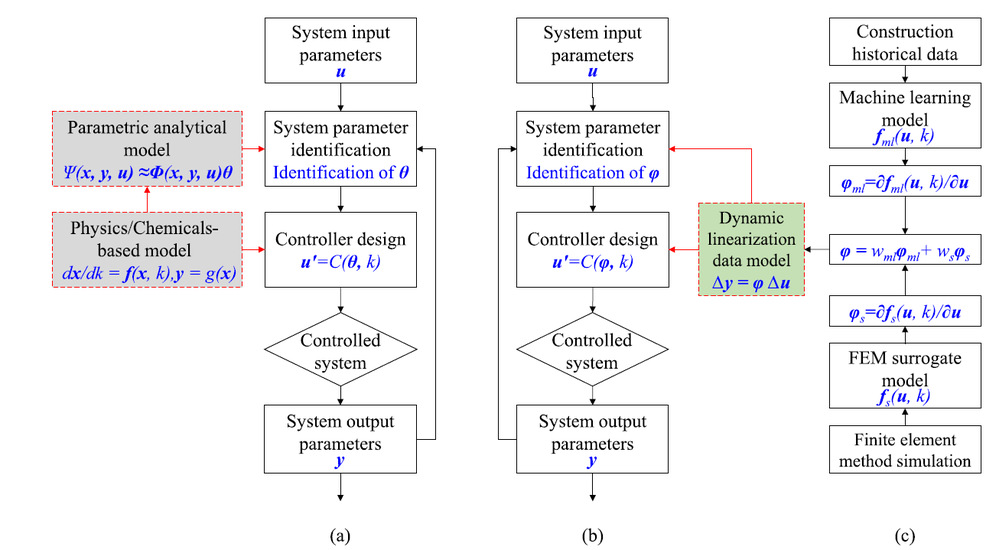
图1 (a)传统自适应控制; (b) 未改进的无模型自适应控制; (c) 改进的无模型自适应控制
大数据模型通过收集大量盾构机历史施工数据,采用机器学习算法建立(图2)。对比了三种常用的机器学习算法并选择了性能最优的多层感知机方法建立大数据预测模型,该模型代表了从大量数据中挖掘出的盾构机姿态变化规律。
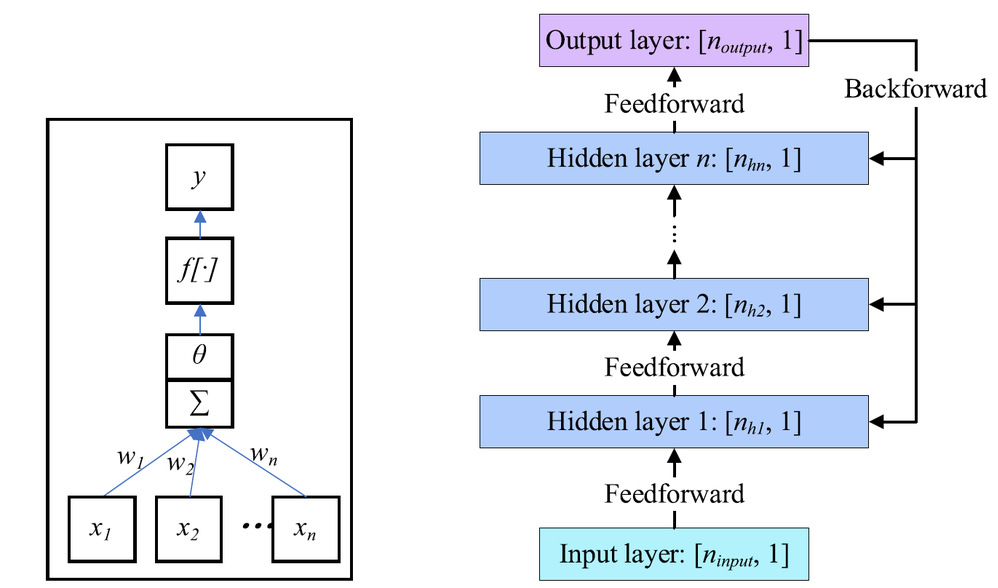
图2 多层感知机算法
同时还建立了盾构施工过程中的盾构机姿态变化的有限元数值模型(图3),考虑了地层的分层,千斤顶的分区,盾构机与地层的接触作用,千斤顶与管片的接触作用等等。
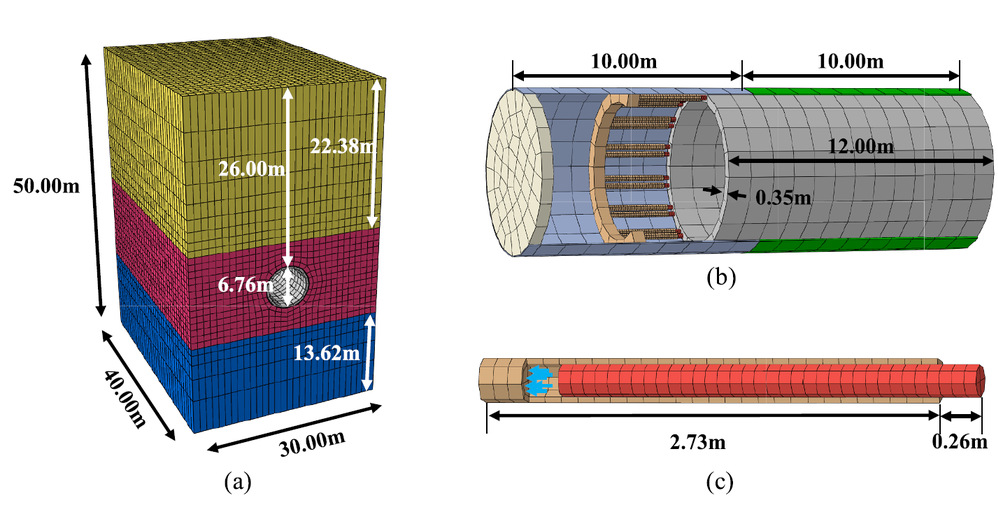
图3 盾构施工过程的数值模型
基于大数据模型和有限元模型的预测结果,对盾构掘进系统的伪梯度进行估计。作为预测模型,大数据模型和有限元模型能够根据当前时刻的盾构机的状态对伪梯度进行快时变的准确估计。相比于未改进的无模型自适应控制采用最小二乘法等参数估计方法基于历史数据进行伪梯度估计,改进的无模型自适应控制基于预测模型的伪梯度估计方法能够更加真实地反映系统的当前状态,对比二者对盾构机姿态的控制效果(图4和图5),可以看出改进的无模型自适应控制具有更加良好的控制效果。
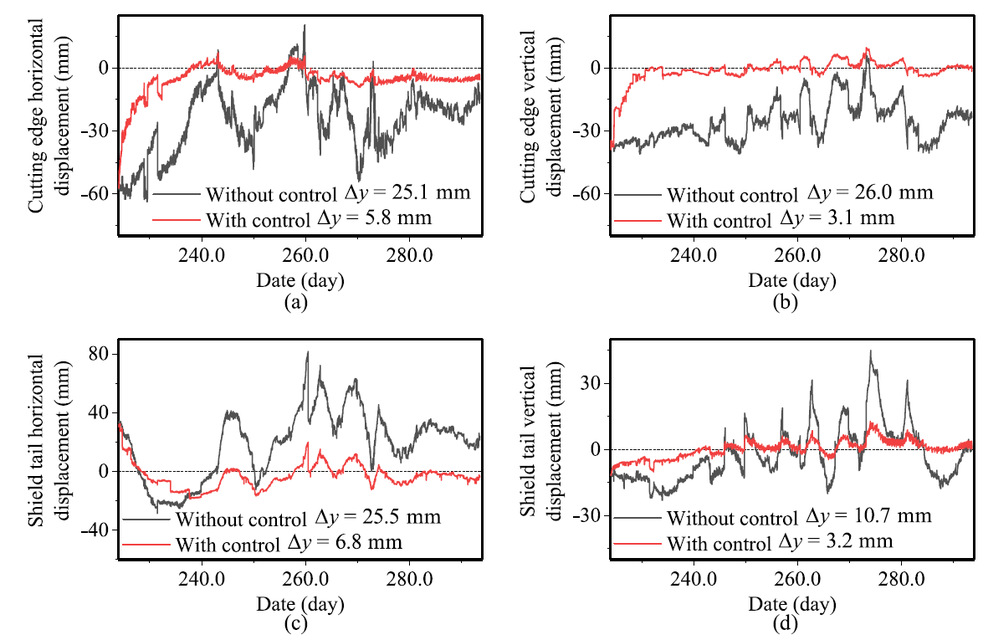
图4 改进的无模型自适应控制对盾构机姿态的控制效果
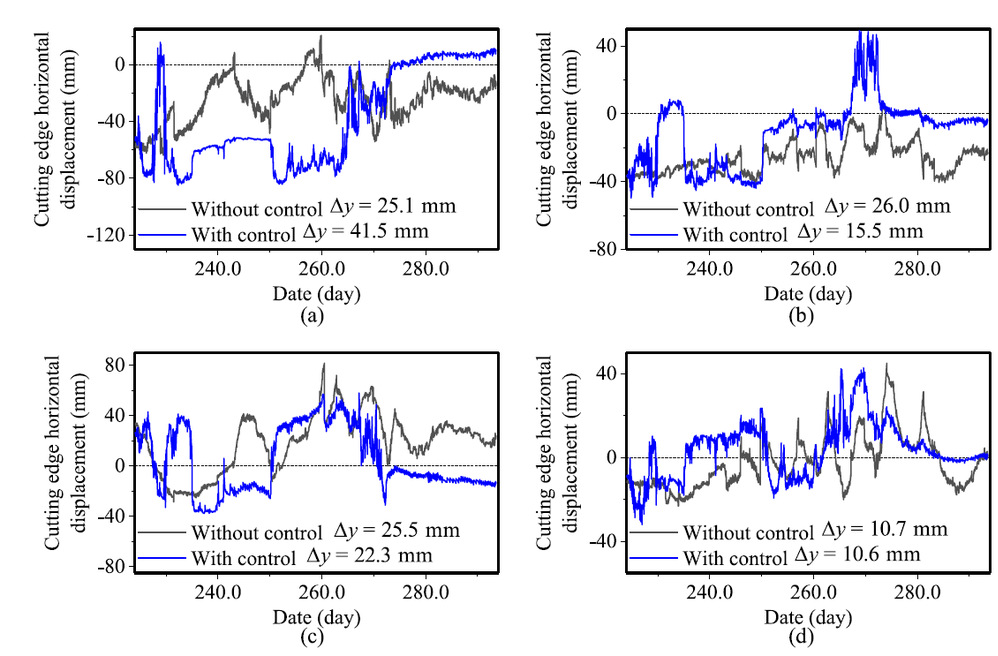
图5 未改进的无模型自适应控制对盾构机姿态的控制效果
此外,分析结果表明,优化后的施工参数能够适应于地层参数的变化。随着盾构机的推进,掌子面上的地层水平侧压力系数逐渐上升,相应的千斤顶压力也逐渐上升(图6)。本文是自适应控制方法在盾构施工领域的率先应用,将人工智能方法应用到无模型自适应控制的伪梯度估计中,有效提高了无模型自适应控制的控制效果。
第一作者

黄宏伟 教授
主要从事岩土与地下基础设施的安全风险管控理论方法与多识智慧感知技术的研究
邮箱:huanghw@tongji,edu.cn
通讯作者

常佳奇 博士研究生
主要从事隧道结构智能监测、盾构法智能施工研究
邮箱:1910278@tongji.edu.cn
第三作者

张东明 教授
主要从事地下工程结构风险控制、地下工程结构计算模型不确定性、地下工程围岩地层不确定性等研究
邮箱:09zhang@tongji.edu.cn
第四作者

Markus Thewes 教授
主要从事隧道施工、土壤改性、浆液改性等相关研究
邮箱:MarkusThewes@rub.de
文献引用
Hongwei Huang, Jiaqi Chang, Dongming Zhang, et al. Improved model-free adaptive control of shield machine posture during tunnelling [J]. Advanced Engineering Informatics, 2025.
https://doi.org/10.1016/j.aei.2025.103465
原文链接
撰稿:常佳奇
编辑:赵欣玥
校对:王 森
审核:申轶尧
Copyright @ 2008-2024 版权所有:同济大学隧道及地下工程研究所—五室
地址:上海市四平路1239号 邮编:200092
 当前位置:
当前位置:






